OpenVLA: новый стандарт в области политик манипулирования роботов
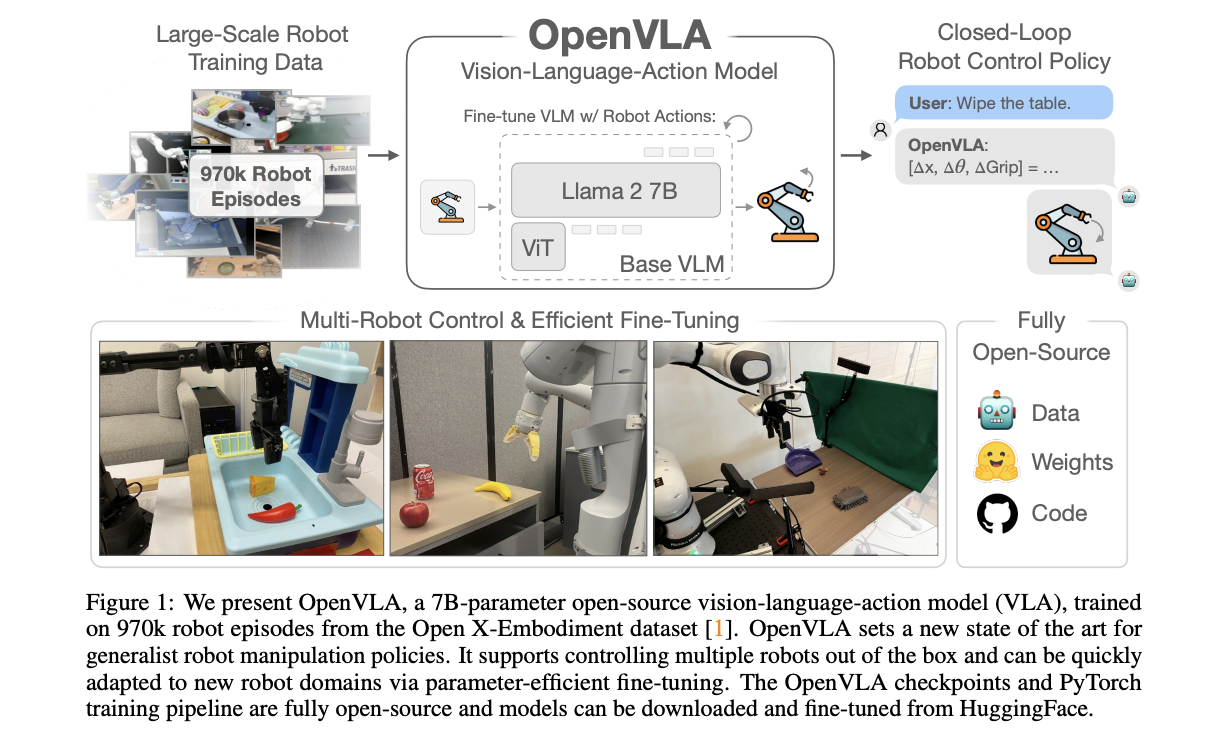
Существующие политики манипулирования роботов имеют серьезные недостатки в обобщении за пределы обучающих данных. Однако исследователи предложили OpenVLA, модель с открытым исходным кодом, которая показывает высокую производительность в управлении различными типами роботов с самого начала.
Практические решения и ценность
OpenVLA представляет собой предварительно обученную модель, которая может быть легко адаптирована к новым настройкам роботов с помощью эффективных техник тонкой настройки параметров. Она является единственным подходом, достигающим по крайней мере 50% успешности во всех протестированных задачах, что делает ее сильным выбором для задач имитационного обучения, особенно тех, которые включают разнообразные языковые инструкции.
Однако у OpenVLA есть ограничения, такие как поддержка только одиночных изображений. Будущая работа включает в себя исследование возможности поддержки нескольких изображений и проприоцептивных входов, а также истории наблюдений.
Если вы хотите, чтобы ваша компания оставалась в числе лидеров и использовала искусственный интеллект грамотно, OpenVLA может быть ключевым решением для улучшения процессов и повышения эффективности.