Исследователи в области компьютерного зрения и робототехники постоянно стремятся улучшить возможности автономных систем в восприятии окружающей среды.
Для эффективного восприятия окружения в реальном времени необходимы модели, способные быстро и правильно обрабатывать визуальную информацию, распознавать, классифицировать и обводить различные объекты.
Одним из значительных вызовов в этой области является повышение точности и эффективности обнаружения и сегментации объектов на изображениях и видеопотоках.
Решение:
Применение методов и алгоритмов глубокого обучения, таких как сверточные нейронные сети (CNN) и трансформаторы, позволяет значительно улучшить процесс обработки визуальной информации и повысить точность распознавания объектов в динамичной среде.
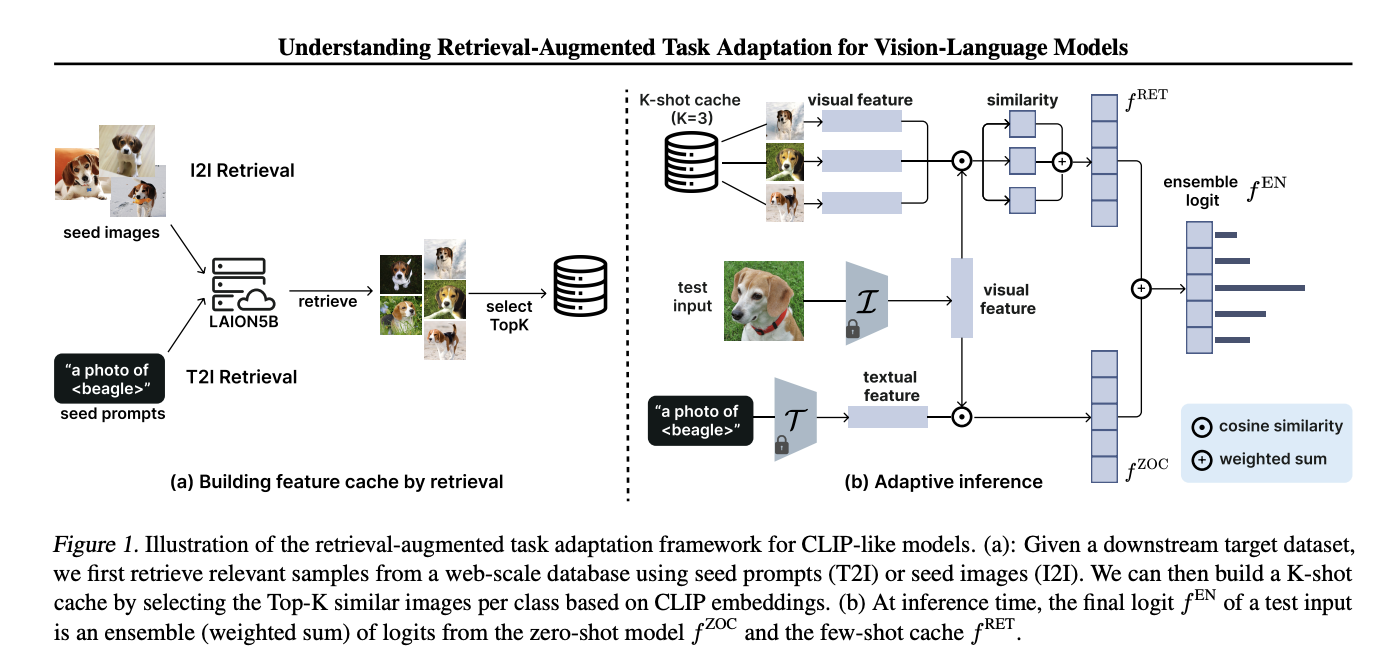
В частности, применение метода retrieval-augmented adaptation для моделей, сочетающее I2I и T2I методы, показывает значительное улучшение точности и снижение ошибок, что подчеркивает потенциал адаптации с помощью поисковых методов в области машинного зрения и языковых моделей.
Эти разработки в области искусственного интеллекта могут быть применены в различных отраслях, включая транспорт, производство и здравоохранение, и привести к значительным улучшениям в автономных системах.