«`html
Deep Patch Visual (DPV) SLAM: Новый метод искусственного интеллекта для монокулярного визуального SLAM на одном GPU
Визуальное одновременное локализация и картографирование (SLAM) — критическая технология в робототехнике и компьютерном зрении, позволяющая оценивать состояние в реальном времени для различных приложений. SLAM стал важным для оценки монокулярной глубины, синтеза изображений и восстановления 3D-позы человека. Однако эти задачи сталкиваются с серьезными проблемами в достижении высокой точности отслеживания с монокулярным видео и без инерциальных измерений. Существующие решения требуют высокопроизводительных графических процессоров с большими объемами памяти, что ограничивает их практическое использование в реальном времени.
Решение проблемы
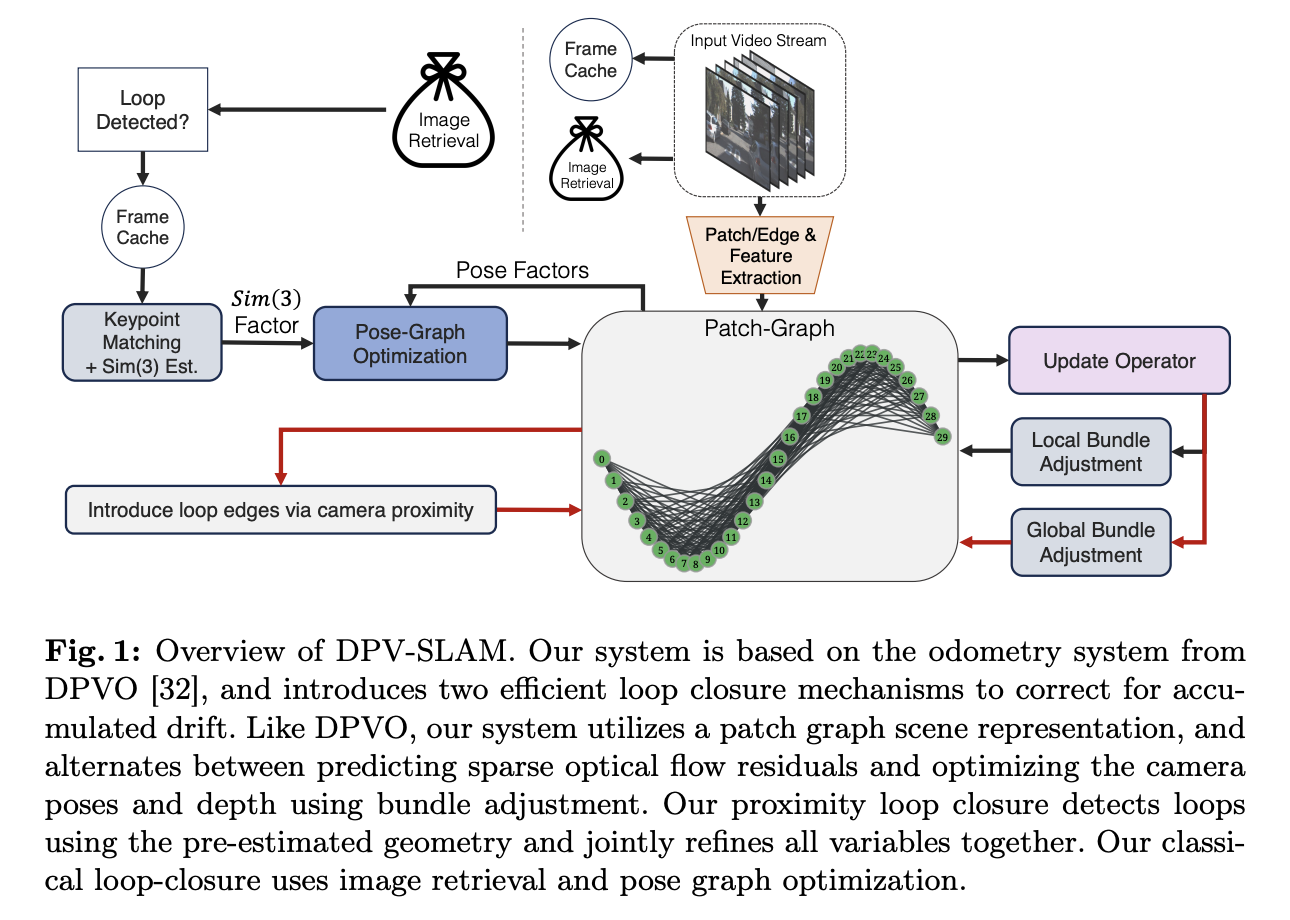
Исследователи из Принстонского университета разработали DPV-SLAM, расширение системы DPVO для оценки состояния, решающее ограничения существующих подходов к глубокому SLAM. DPV-SLAM продемонстрировал выдающуюся производительность на различных наборах данных, включая EuRoC, KITTI, TUM-RGBD и TartanAir, показывая улучшения в точности, скорости и надежности по сравнению с существующими методами.
Практическая ценность
DPV-SLAM внедряет два эффективных механизма для коррекции дрейфа: близкий замыкание петли и классический замыкание петли. Метод также успешно справляется с проблемой масштаба дрейфа на наборе данных KITTI, работая на частоте 39 FPS и обеспечивая эффективное решение проблем.
Вывод
Достигнутые результаты свидетельствуют о универсальности и эффективности DPV-SLAM в различных областях. Хотя он нуждается в графическом процессоре и предлагает только разреженную 3D-реконструкцию, его общая производительность и эффективность делают его ценным для области компьютерного зрения. Отмечается, что DPV-SLAM обладает ограничением в виде квадратичного масштабирования слоя мировой коррекции пакета с переменными позы, однако это ограничение управляется ограничением диапазона до 1000 кадров.
«`