Графовые нейронные сети (GNN) для планирования движения
GraphMP: Графовый нейронный планировщик движения
GraphMP — нейронный планировщик движения, способный работать с задачами различной размерности, от 2D-лабиринтов до высокомерных робототехнических манипуляторов. Его ключевое преимущество заключается в настраиваемой архитектуре и методике обучения, позволяющей эффективно извлекать графовые шаблоны и обрабатывать поиск по графу.
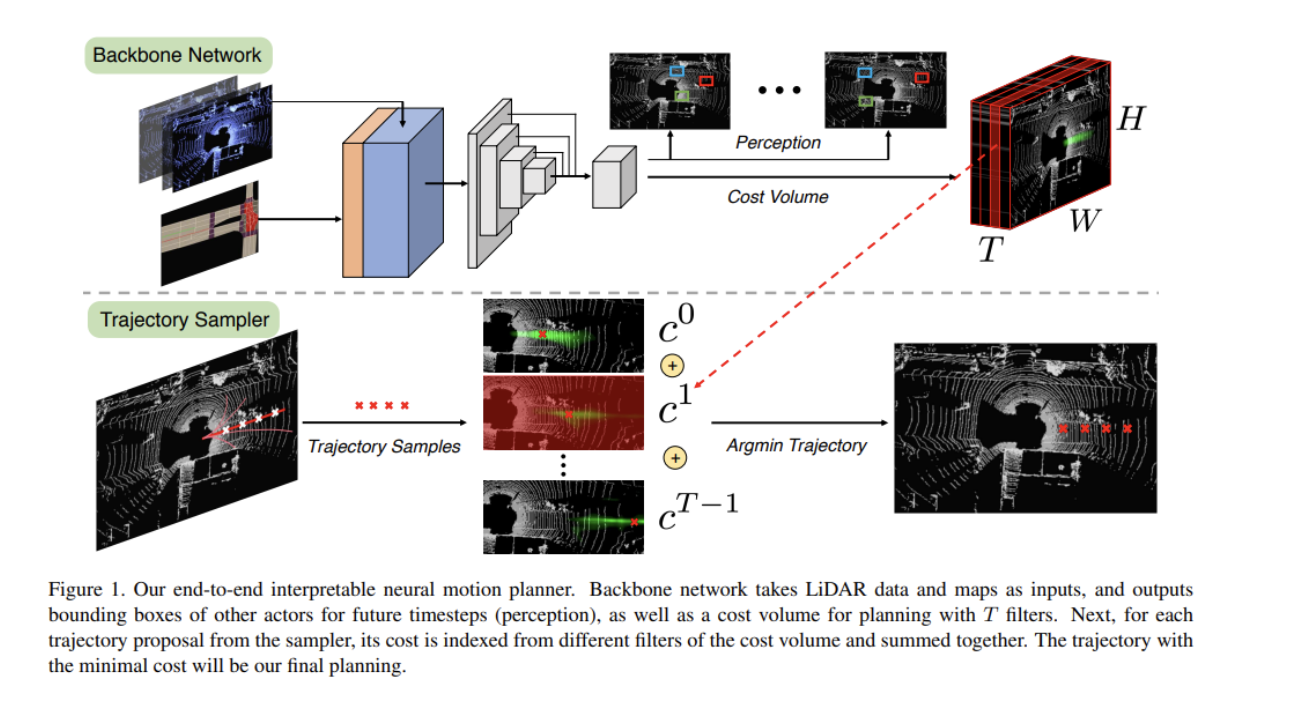
Энд-ту-энд нейронный планировщик движения
Этот планировщик акцентирует внимание на безопасности и соблюдении правил в городской среде. Интеграция данных LIDAR и HD-карт позволяет создавать детальные 3D-представления и прогнозы для автономных автомобилей.
Сети планирования движения (MPNet)
MPNet интегрирует глубокое обучение в планирование движения для эффективной навигации в высокомерных пространствах. Его сеть-кодировщик создает латентное пространственное представление препятствий, а планирующая сеть предсказывает пути на основе конфигурации робота.
Заключение
Графовые нейронные сети для планирования движения предлагают значительные преимущества в робототехнической навигации. Разнообразные подходы GraphMP, Энд-ту-энд планировщика и MPNet демонстрируют, что эта технология может адаптироваться к широкому спектру сред, обеспечивая скорость, эффективность и безопасность в планировании оптимальных путей для автономных систем.