RoboMorph: улучшение дизайна роботов с помощью больших языковых моделей и эволюционных алгоритмов машинного обучения для повышения эффективности и производительности
Робототехника переживает трансформационные изменения благодаря интеграции генеративных методов, таких как большие языковые модели (LLM). Эти достижения позволяют создавать сложные системы, которые автономно навигируют и адаптируются к различным средам. Применение LLM в процессах дизайна и управления роботами представляет собой значительный прорыв, предлагая потенциал создания более эффективных и способных выполнять сложные задачи с большей автономностью роботов.
Практические решения и ценность:
RoboMorph — инновационная платформа, объединяющая LLM, эволюционные алгоритмы и обучение с подкреплением (RL) для автоматизации дизайна модульных роботов. Этот подход позволяет генерировать разнообразные и оптимизированные дизайны роботов более эффективно, чем традиционные методы.
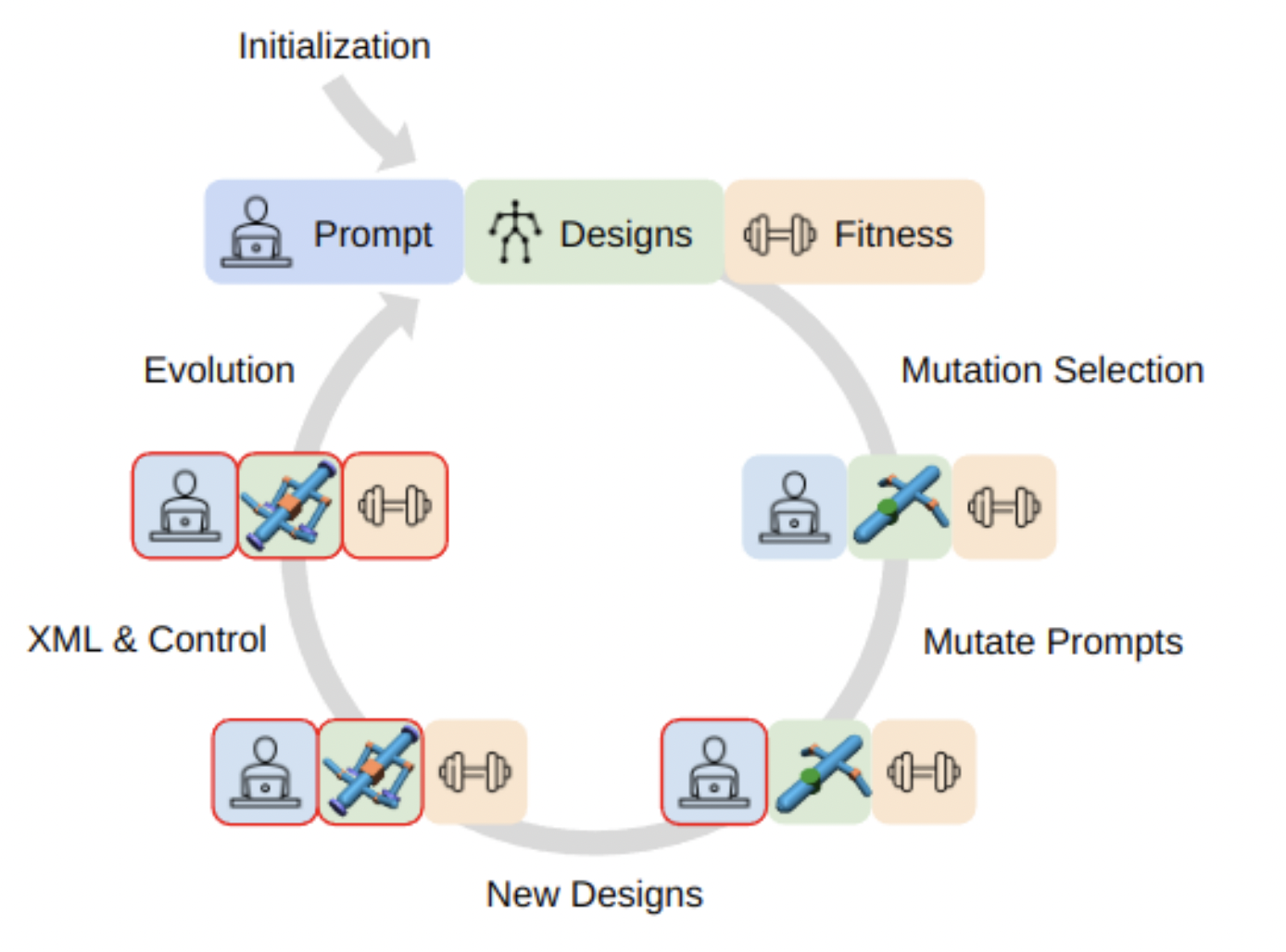
RoboMorph работает, представляя дизайны роботов в виде грамматик, которые LLM используют для исследования дизайнерского пространства. Каждая итерация начинается с алгоритма бинарного турнира, который выбирает половину популяции для мутации. Выбранные подсказки мутируются, и новые подсказки используются для создания новой партии дизайнов роботов. Эти дизайны компилируются в XML-файлы и оцениваются с помощью симулятора физики MuJoCo для получения оценок приспособленности. Этот итеративный процесс позволяет RoboMorph улучшать дизайны роботов в последующих поколениях, демонстрируя значительные морфологические преимущества. Эволюционные алгоритмы обеспечивают разнообразный и сбалансированный выбор дизайнов, предотвращая преждевременную сходимость и способствуя исследованию новых конфигураций.
Производительность RoboMorph была оценена через эксперименты, включающие десять сидов, десять эволюций и размер популяции в четыре. Каждая итерация включала мутацию подсказок и применение алгоритма управления на основе RL для вычисления оценок приспособленности. Оценка приспособленности, средняя награда за 15 случайных прокатов, показала положительную тенденцию с каждой итерацией. RoboMorph значительно улучшил морфологию роботов, генерируя оптимизированные дизайны, превосходящие традиционные методы. Топовые дизайны роботов, адаптированные для плоских местностей, показали, что увеличение длины корпуса и постоянные размеры конечностей способствовали улучшению передвижения и стабильности.
RoboMorph представляет собой многообещающий подход к решению сложностей дизайна роботов. Интеграция генеративных методов, эволюционных алгоритмов и управления на основе RL позволяет улучшить процесс дизайна и функциональность роботов, демонстрируя потенциал для применения в реальном мире. Будущие исследования будут сосредоточены на масштабировании экспериментов, улучшении операторов мутации, расширении дизайнерского пространства и исследовании различных сред.
В заключение, RoboMorph использует силу LLM и эволюционных алгоритмов для создания платформы, которая улучшает процесс дизайна и производит оптимизированные морфологии роботов. Этот подход преодолевает ограничения ранее существовавших методов и предлагает перспективный путь для разработки более эффективных и способных роботов. Результаты экспериментов RoboMorph подчеркивают его потенциал для революции в дизайне роботов.
Если вы хотите узнать больше о том, как RoboMorph и другие решения в области искусственного интеллекта могут изменить вашу работу, обращайтесь к нам для получения профессиональной консультации. Мы поможем вам определить оптимальное применение автоматизации и внедрить решения постепенно, обеспечивая высокую эффективность и результативность.
Попробуйте наши решения и увидите, как искусственный интеллект может изменить ваш бизнес к лучшему!