Применение искусственного интеллекта в робототехнике
Решение последовательных задач, требующих нескольких шагов, представляет значительные вызовы в робототехнике, особенно в реальных приложениях, где роботы действуют в неопределенных средах. Окружающие среды часто являются стохастическими, что означает, что роботы сталкиваются с изменчивостью в действиях и наблюдениях. Одной из основных целей в робототехнике является повышение эффективности робототехнических систем, позволяя им справляться с долгосрочными задачами, требующими продолжительного рассуждения.
Проблема и решение
Основная проблема исследователей заключается в неспособности робота эффективно учиться на основе прошлых действий. Роботы полагаются на методы, такие как обучение с подкреплением (RL), чтобы улучшить производительность. Однако RL требует множества попыток, часто в миллионах, для того чтобы робот стал мастером в выполнении задач. Это непрактично, особенно в частично наблюдаемых средах, где роботы не могут взаимодействовать непрерывно из-за связанных рисков.
Недавние методы включили критиков, чтобы оценить осуществимость решений. Однако они все еще уступают в одном критическом аспекте: способности хранить и извлекать полезные знания из прошлых взаимодействий. Эта пробел означает, что эти системы могут хорошо справляться с краткосрочными или статическими задачами, но их производительность ухудшается в динамических средах, требующих непрерывного обучения и адаптации.
Решение RAG-Modulo
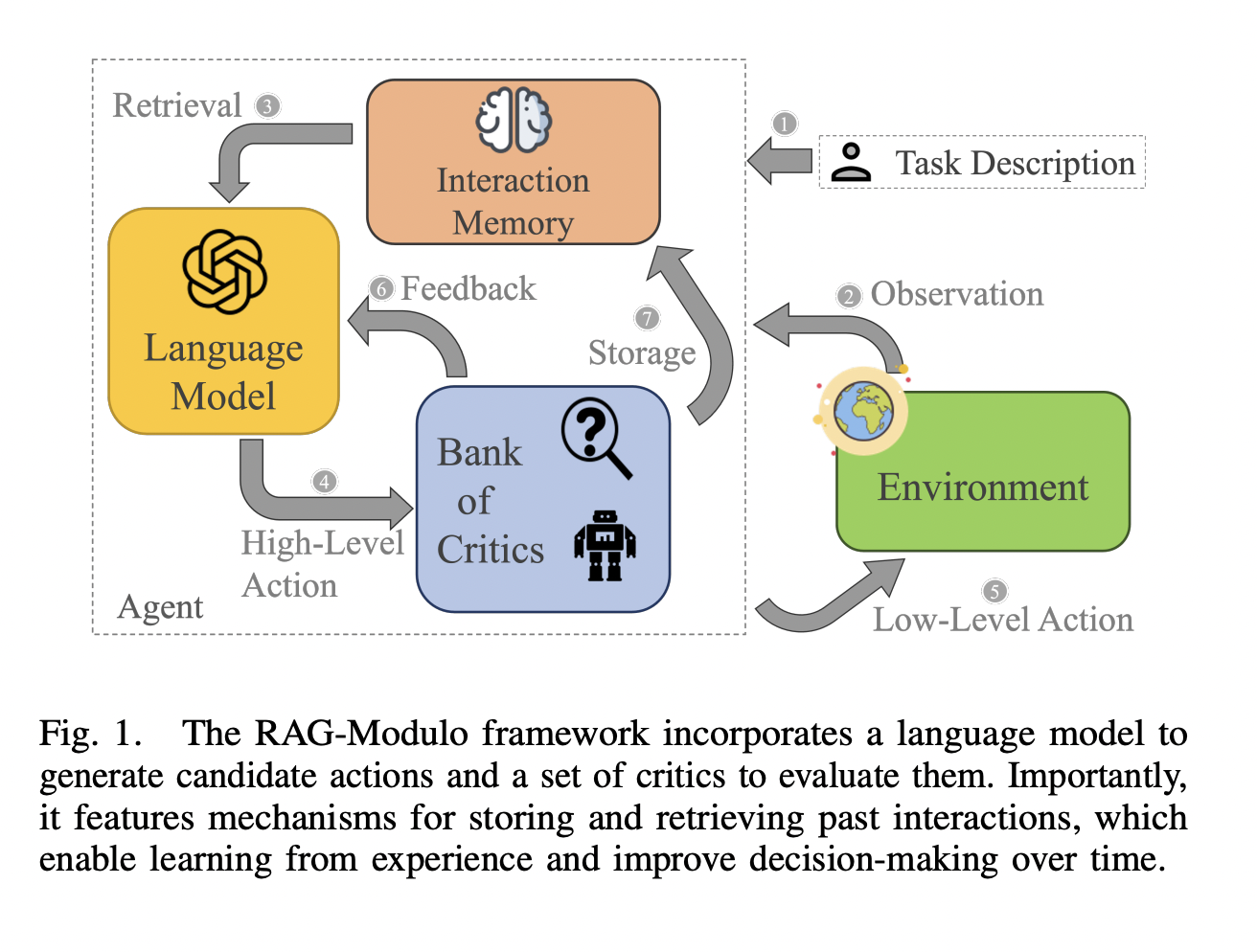
Исследователи из Райсского университета представили фреймворк RAG-Modulo. Эта новая система улучшает агентов на основе LLM, оборудуя их памятью взаимодействия. Эта память хранит прошлые решения, позволяя роботам вспоминать и применять соответствующий опыт при столкновении с аналогичными задачами в будущем.
Фреймворк RAG-Modulo поддерживает динамическую память взаимодействия робота, позволяя ему извлекать прошлые действия и результаты в качестве примеров в контексте. При столкновении с новой задачей фреймворк использует эту память для направления процесса принятия решений робота, избегая повторных ошибок и повышая эффективность.
Производительность RAG-Modulo была тщательно протестирована в двух стандартных средах: BabyAI и AlfWorld. Система продемонстрировала значительное улучшение по сравнению с базовыми моделями, достигая более высоких показателей успешности и сокращая число невозможных действий.
Заключение
Фреймворк RAG-Modulo представляет собой значительный прогресс в области возможности роботов учиться на основе прошлых взаимодействий и применять это знание к будущим задачам. Решая критическую проблему сохранения памяти в агентах на основе LLM, система предоставляет масштабируемое решение для выполнения сложных долгосрочных задач.