CollaMamba: эффективное решение для совместного восприятия в автономных системах
Коллаборативное восприятие играет ключевую роль в автономном вождении и робототехнике. Агенты, такие как транспортные средства или роботы, должны работать вместе, чтобы понимать окружающую среду точнее и эффективнее. Путем обмена сенсорных данных между несколькими агентами повышается точность и глубина восприятия окружающей среды, что приводит к созданию более безопасных и надежных систем.
Практические решения и ценность:
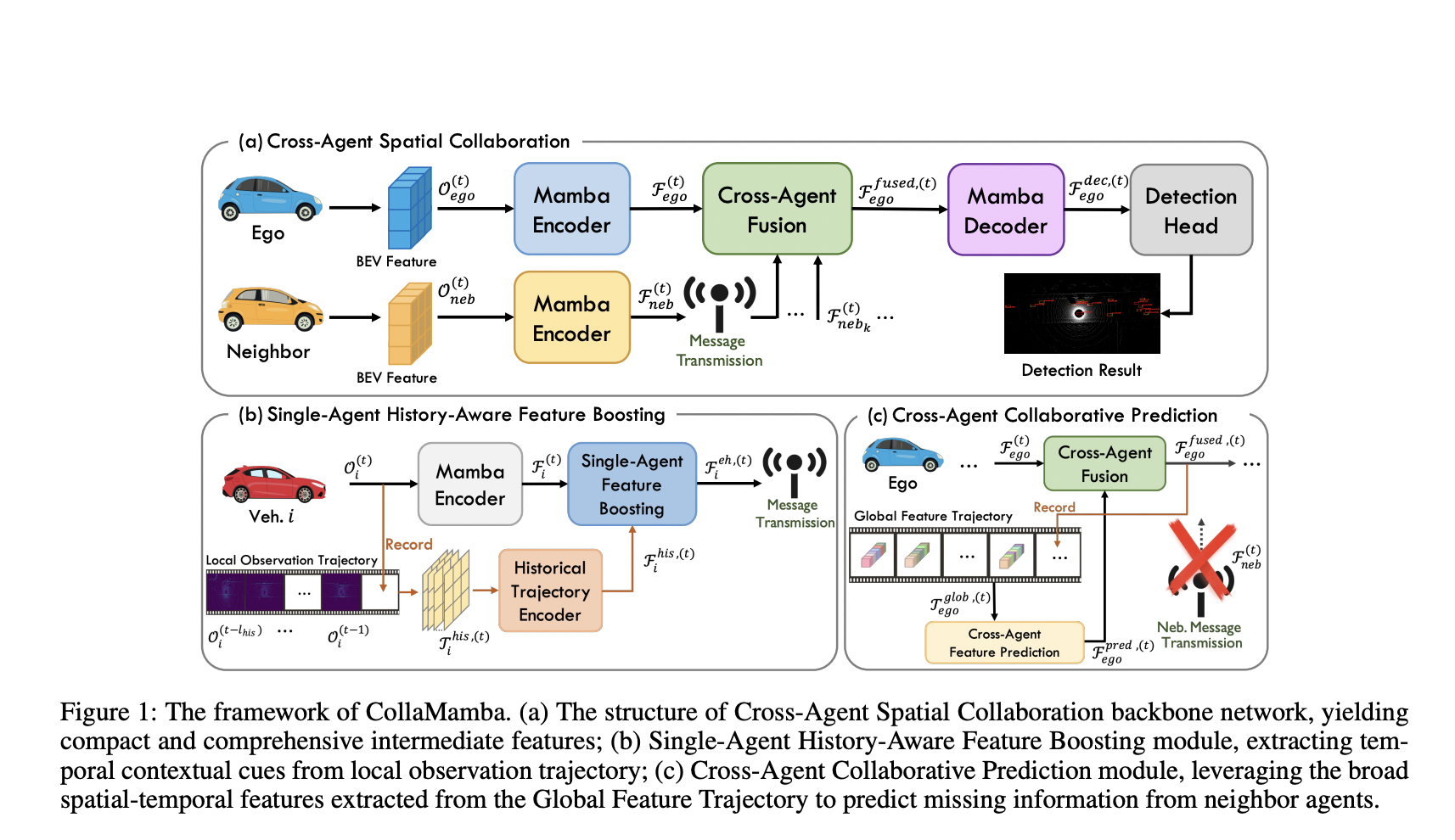
- Система CollaMamba позволяет агентам обмениваться компактными, всесторонними представлениями признаков, что способствует лучшему восприятию без перегрузки вычислительных и коммуникационных систем.
- Модель CollaMamba демонстрирует значительные улучшения производительности по сравнению с существующими методами, обеспечивая при этом снижение затрат ресурсов.
- CollaMamba обладает способностью эффективно функционировать даже при неполадках в коммуникации между агентами, что делает ее практичным решением для реальных сред.
Внедрение CollaMamba в автономные системы позволяет улучшить точность задач восприятия, снизить нагрузку на ресурсы и обеспечить эффективное взаимодействие между агентами даже в условиях нестабильной коммуникации.