PLAN-SEQ-LEARN: Метод машинного обучения, который интегрирует возможности долгосрочного планирования языковых моделей с ловкостью обученных политик обучения с подкреплением RL
Исследования в области робототехники значительно изменились благодаря интеграции больших языковых моделей (LLM). Эти достижения предоставляют возможность направлять робототехнические системы в решении сложных задач, включающих тонкое планирование и манипуляции на длительный срок.
Практические решения и ценность
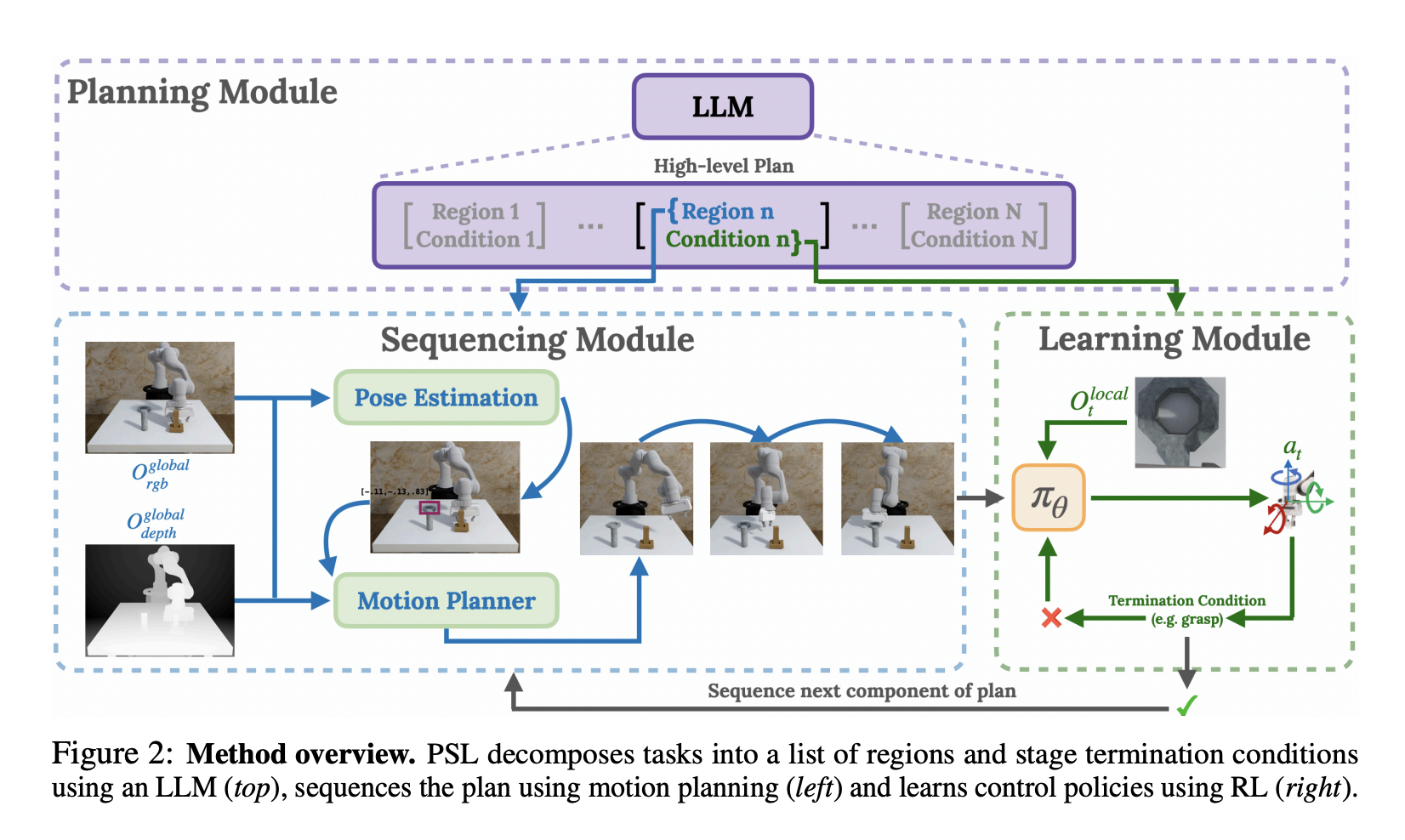
Метод PSL представляет собой модульное решение, которое интегрирует LLM-основанное планирование для направления политик RL в решении долгосрочных робототехнических задач. PSL разбивает задачи на три этапа: планирование на языке высокого уровня (Plan), планирование движения (Seq) и обучение на основе RL (Learn).
Метод PSL демонстрирует эффективность в использовании LLM для планирования на высоком уровне, последовательности движений с использованием моделей зрения и уточнения стратегий управления через RL. Модульное планирование и обучение в реальном времени делают PSL многообещающим фреймворком для будущих применений робототехники, позволяя роботам решать сложные задачи, включающие многократные этапы планирования.
Для получения более подробной информации ознакомьтесь с статьей и проектом.
Интеграция ИИ в бизнес
Если вы хотите, чтобы ваша компания развивалась с помощью искусственного интеллекта (ИИ) и оставалась в числе лидеров, грамотно используйте PLAN-SEQ-LEARN. Проанализируйте, как ИИ может изменить вашу работу, определите, где возможно применение автоматизации и подберите подходящее решение из множества вариантов ИИ.
Если вам нужны советы по внедрению ИИ, пишите нам на Telegram.
Узнайте, как ИИ может изменить ваш бизнес с решениями от Flycode.ru.
Если вам нравится наша работа, вам понравится и наша рассылка.